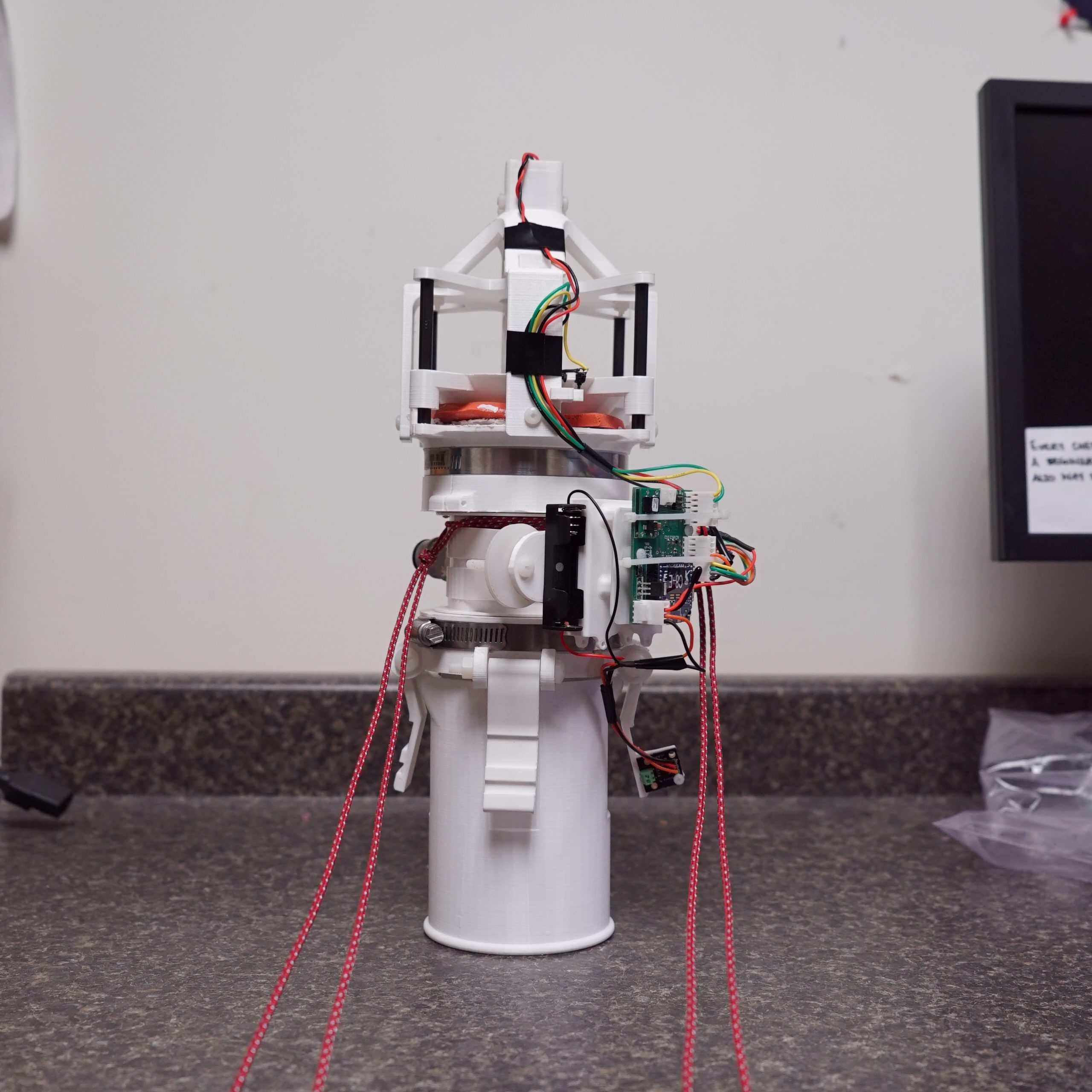
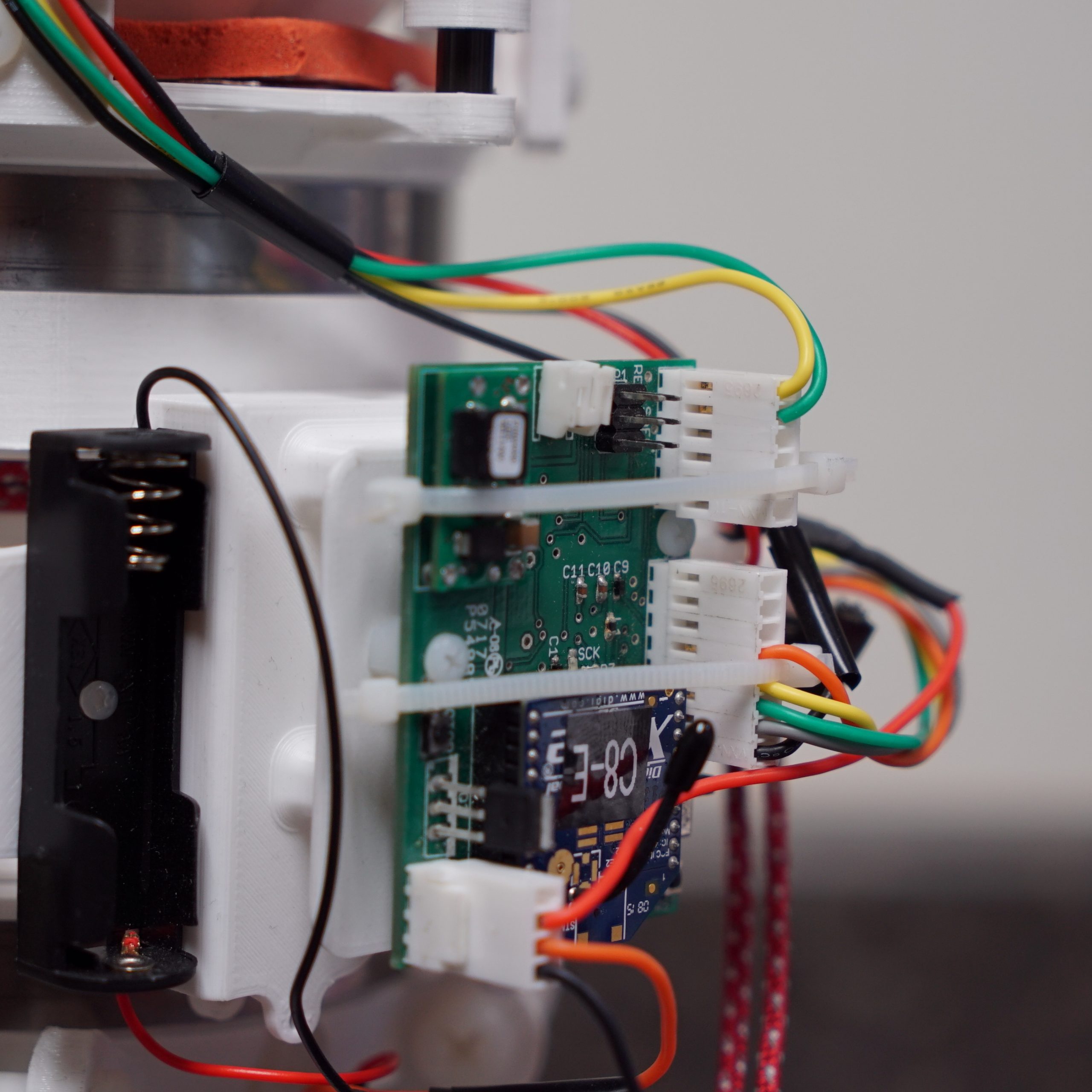

The valve actuates on an ACME threaded power screw driven by a small 6V Pololu motor geared 298:1 and driven at 5V. The motion of the valve is limited by limit switches that provide feedback to the controller. The system controller is a proprietary AVR based controller board used in many MSGC BOREALIS systems. The board sports an XBEE radio module for receiving commands along with a boost converter so the system can be powered off of a 3. 2V lithium-ion battery. The system also includes a brand new cutdown mechanism that uses flaps to detach from the balloon when necessary. A video of the cutdown in operation can be found here. This project was accepted for presentation at National Council on Undergraduate Research 2020.
PreviousNext
Project Description
This project sought to design, test, construct, and fly a system to allow elevation control of a high-altitude helium balloon by venting helium. This control capability is the first step in achieving “stationkeeping”, the ability to maintain and direct the location of a balloon above the Earth.
Details
- Client:
- Categories:
- Skills:
- Project Url:
- Share: